-
1 control
1. управление || управлять2. контроль || контролировать3. pl. органы управления; рычаги управления4. борьба (напр., с проявлениями в скважине), контроль; наблюдениеcontrol of formation pressure — борьба с проявлениями пластового давления при бурении, сдерживание пластового давления
control of high pressure wells — контроль скважин высокого давления, сдерживание давления в высоконапорных скважинах
* * *
1. контроль; проверка2. управление; регулирование3. орган управления; управляющее устройство
* * *
управление; контроль; механизм подачи; сеть опорных точек (геодезическая основа, привязка); наблюдение
* * *
регулирование, настройка; контроль; управление
* * *
1) контроль; проверка2) управление; регулирование3) орган управления (/i]); управляющее устройство4) борьба (напр. с проявлениями в скважине)•- control of formation pressurecontrol over encountered subsurface pressures — контроль давления во вскрытых пластах;
- control of gas oil ratio
- control of high pressure well
- automatic drilling control
- automatic process control
- automatic winch control
- blowout control
- blowout preventer control
- casing string cementing quality control
- cementing quality control
- centralized control
- choke control
- circulation-loss control
- clay control
- complete control
- computerized production control
- corrosion control
- counterweight swing control
- damage control
- depth control
- direct supporting feed control
- drill control
- driller's control
- drilling control
- drilling mud properties control
- drilling mud rheological properties control
- drilling process control
- elastic control
- facies control of oil occurrence
- fail-safe control
- failure control
- failure recurrence control
- feed control
- feed control of direct supporting type
- field development control
- fire control
- flow control
- flow-ratio control
- formation pressure control
- gas-hydration control
- gas-oil level control
- gas-production control
- ground control
- hole deviation control
- hydraulic control
- hydraulic control of disk clutch
- hydraulic drilling control
- inspection control
- interface level control
- level control
- lever control
- liquid level control
- loss control
- lost circulation control
- maintainability control
- maintenance control
- manufacturing reliability control
- mud control
- nuclear powered blowout presenter controls
- oil-losses control
- oil-production control
- oil-spill control
- oil-stock loss control
- paraffin control
- pipeline control
- pipeline dispatch control
- pollution control
- pressure control
- preventive control
- producing well control
- production control
- reliability control
- reliability data control
- refinery control
- remote control
- reverse control
- safety control
- sand control
- sand pressure control
- scale control
- serviceability control
- solids control
- stepless speed control
- teletype control
- temperature control
- throttle control
- tie-bottom control
- tong-torque control
- total drilling control
- total mechanical solids control
- traffic control
- valve control
- water control
- weight control
- weight-on-bit control
- well control
- well boring control
- well production control
- well velocity control
- withdrawal rate control* * * -
2 control
1) управление; регулирование, регулировка || управлять; регулировать2) орган управления; регулятор; орган настройки3) система управления; система регулирования4) pl средства управления; средства регулирования5) контроль; проверка || контролировать; проверять6) система контроля; система проверки7) pl средства контроля; средства проверки8) pl методы контроля; рычаги управления9) вчт контроллер10) pl вчт методы управления данными и контроля данных в процессе обработки11) pl вчт позиции управления экранного меню12) управляющий провод ( криотрона)•- access controlcontrol during material — регулирование ( уровня громкости) во время передачи сигнала
- ActiveX control - airport radar control
- air-traffic control
- amplitude balance control
- ANSI screen control
- antenna position control
- anticipatory control
- anticlutter gain control
- approach control
- armature voltage control
- artistic effect control
- astatic control
- attitude control
- audible control
- audio-fidelity control
- audio volume control
- automatic control
- automatic background control
- automatic bandwidth control
- automatic bias control
- automatic brightness control
- automatic chroma control
- automatic chrominance control
- automatic color control
- automatic contrast control
- automatic fine-tuning control
- automatic flight control
- automatic frequency control - automatic light control
- automatic load control
- automatic modulation control - automatic phase control
- automatic picture control
- automatic range control
- automatic recording level control
- automatic remote control
- automatic selectivity control
- automatic sensitivity control
- automatic tint control
- automatic voltage control
- automatic volume -control
- automatic volume expansion control - balance control
- bandspread tuning control
- bang-bang control
- bass control
- beam-rider control
- bilateral control
- black level control
- blue-gain control
- breath control
- brightness control
- brilliance control
- bumped phase control
- camera control
- carrier-current control
- Cartesian control
- cascade control
- centering control
- charge control
- chroma control
- chromaticity control
- chrominance-gain control
- closed-loop control
- coarse control
- color-saturation control
- command control
- compensated volume control
- computer control - computerized numerical control
- concurrency control
- concurrency control and recovery
- continuity control
- continuous control
- continuous feedback control
- contouring control
- contrast control
- convergence control
- convergence phase control
- counter control
- crystal control
- cue control
- cursor control
- cybernetic control
- data acquisition control
- data-link control
- data recording control
- dc motor control
- delayed automatic volume control
- depth control
- derivative control
- differential gain control
- digital control
- digital remote control
- direct digital control
- directional control
- direct manual control - distribution control
- domain-wall state control
- dramatic effect control
- drive control
- dual control
- dynamic astigmatism control
- dynamic contrast control
- echo duration control
- echo return control
- echo tone control
- electrical control
- electronic control
- electronic motor control
- embedded control
- end-point control
- end-to-end control
- environmental control
- error control
- external control
- fail-safe control - feedback tone control
- feedforward control
- field-effect conductivity control
- field linearity control
- fine-tuning control
- finite control - focus control
- focusing control
- follow-up control
- foot control
- forms control - framing control
- frequency control - front-panel control
- full-wave control
- fuzzy control
- gain control
- gain-sensitivity control
- gain-time control
- ganged volume control - global control
- green-gain control
- grid control
- ground control
- guidance control
- half-wave control
- hardware error control
- height control
- hierarchical control
- hierarchically intelligent control - high-level data-link control
- hold control
- holding control
- homing control
- horizontal-amplitude control
- horizontal centering control
- horizontal convergence control
- horizontal drive control
- horizontal hold control
- horizontal-linearity control
- horizontal parabola control
- hue control
- illumination control
- independent control
- inertial control
- infinitely fast control
- infinity control
- in-process control - intelligent control
- intensity control
- interface-shape control
- interference control
- intermediate control
- intermittent control
- internal control
- interrupt control
- inventory control - keyboard reset control
- learning control
- linear control
- linearity control
- local control
- logical control - loop control
- loudness control
- lower-level intelligent control
- manual control - master brightness control
- master gain control
- material gap control
- mechanical fader control
- medium access control - microprocessor control
- microprogrammed control
- middle control
- MIDI control
- mission control
- mobile communications control
- mode control
- motor control
- motor-concatenation control
- motor-field control
- motor-voltage control
- multicoordinate control
- multivariable control
- musical instrument digital interface control
- narrow control
- neighboring optimal control
- neuromuscular control
- noise gain control
- nuclear level control
- numerical control
- off-line control
- on-line control
- on-off control
- open-loop control
- optimal control
- organizational control
- overtemperature control
- parametric control
- parity control
- partitioned adaptive control
- passively adaptive control
- pattern control
- peaking control
- peripheral control
- phase control
- phase-shift control
- photoelectric control
- photoelectric loop control
- photoelectric register control
- pin control
- plugged control
- point-to-point control
- portamento control
- positioning control
- power up/down control
- precision control
- presence control
- priority control
- process control
- program control
- programmable gain control
- project control
- proportional control
- proportional plus derivative control
- proportional plus integral plus derivative control
- PTP control
- purity control
- push-button control
- quality control - radar traffic control - random decision-directed adaptive control
- range control
- rate control
- ratio control
- ray-control
- real-time control
- recording control
- red-gain control
- reflexive control
- regeneration control
- regional playback control
- reject control
- relay control
- relay directional control
- reliability control
- remote control
- retarded control
- rewind control
- RFI control
- ringing control
- robot control
- roll-and-pitch control
- rounding control
- saturation control
- screen control
- security controls
- selectivity control
- self-acting control
- self-organizing control
- semiremote control
- sensitivity control
- sensitivity-time control
- sequence control - servo-loop control
- set-point control
- sidetone control
- single-dial control
- size control
- slide control
- software error control
- sound control
- sound volume control
- speech control
- speed control
- spin control
- squelch control
- static control - surge control
- swept gain control - tapped control
- temperature control
- temporal gain control
- time polarity control
- time-schedule control
- time-varied gain control
- titration control
- tone control
- tone-compensated audio volume control - touch-sensitive control
- traffic control
- treble control
- trigger control
- tuning control
- undertemperature control
- unilateral control
- usage parameter control
- variable speech control
- vertical-amplitude control
- vertical-centering control
- vertical convergence control
- vertical-hold control
- vertical-linearity control
- video gain control - volume control
- white-level control
- wide control
- width control
- μP control -
3 control
1) управление; регулирование, регулировка || управлять; регулировать2) орган управления; регулятор; орган настройки3) система управления; система регулирования4) pl. средства управления; средства регулирования5) контроль; проверка || контролировать; проверять6) система контроля; система проверки7) pl. средства контроля; средства проверки8) pl. методы контроля; рычаги управления9) вчт. контроллер10) pl.; вчт. методы управления данными и контроля данных в процессе обработки11) pl.; вчт. позиции управления экранного меню12) управляющий провод ( криотрона)•- acceptance controlcontrol during material — регулирование ( уровня громкости) во время передачи сигнала
- access control
- ActiveX control
- adaptive control
- aids-to-navigation radio control
- airport ground traffic control
- airport radar control
- air-traffic control
- amplitude balance control
- ANSI screen control
- antenna position control
- anticipatory control
- anticlutter gain control
- approach control
- armature voltage control
- artistic effect control
- astatic control
- attitude control
- audible control
- audio volume control
- audio-fidelity control
- automatic background control
- automatic bandwidth control
- automatic bias control
- automatic brightness control
- automatic chroma control
- automatic chrominance control
- automatic color control
- automatic contrast control
- automatic control
- automatic fine-tuning control
- automatic flight control
- automatic frequency control
- automatic gain control
- automatic knee control
- automatic level control
- automatic light control
- automatic load control
- automatic modulation control
- automatic overload control
- automatic peak search control
- automatic pedestal control
- automatic phase control
- automatic picture control
- automatic range control
- automatic recording level control
- automatic remote control
- automatic selectivity control
- automatic sensitivity control
- automatic tint control
- automatic voltage control
- automatic volume expansion control
- automatic volume level control
- automatic volume-control
- background control
- balance control
- bandspread tuning control
- bang-bang control
- bass control
- beam-rider control
- bilateral control
- black level control
- blue-gain control
- breath control
- brightness control
- brilliance control
- bumped phase control
- camera control
- carrier-current control
- Cartesian control
- cascade control
- centering control
- charge control
- chroma control
- chromaticity control
- chrominance-gain control
- closed-loop control
- coarse control
- color-saturation control
- command control
- compensated volume control
- computer control
- computer numerical control
- computer-aided quality control
- computerized numerical control
- concurrency control and recovery
- concurrency control
- continuity control
- continuous control
- continuous feedback control
- contouring control
- contrast control
- convergence control
- convergence phase control
- counter control
- crystal control
- cue control
- cursor control
- cybernetic control
- data acquisition control
- data recording control
- data-link control
- dc motor control
- delayed automatic volume control
- depth control
- derivative control
- differential gain control
- digital control
- digital remote control
- direct digital control
- direct manual control
- direct numerical control
- directional control
- distributed control
- distribution control
- domain-wall state control
- dramatic effect control
- drive control
- dual control
- dynamic astigmatism control
- dynamic contrast control
- echo duration control
- echo return control
- echo tone control
- electrical control
- electronic control
- electronic motor control
- embedded control
- end-point control
- end-to-end control
- environmental control
- error control
- external control
- fail-safe control
- fast automatic gain control
- feedback control
- feedback tone control
- feedforward control
- field linearity control
- field-effect conductivity control
- fine-tuning control
- finite control
- flight control
- flow control
- focus control
- focusing control
- follow-up control
- foot control
- forms control
- forward error control
- frame control
- framing control
- frequency control
- frequency monitoring and interference control
- frequency-response control
- front-panel control
- full-wave control
- fuzzy control
- gain control
- gain-sensitivity control
- gain-time control
- ganged volume control
- gate mobile communications control
- generator field control
- global control
- green-gain control
- grid control
- ground control
- guidance control
- half-wave control
- hardware error control
- height control
- hierarchical control
- hierarchically intelligent control
- higher-level intelligent control
- high-level data link control
- high-level data-link control
- hold control
- holding control
- homing control
- horizontal centering control
- horizontal convergence control
- horizontal drive control
- horizontal hold control
- horizontal parabola control
- horizontal-amplitude control
- horizontal-linearity control
- hue control
- illumination control
- independent control
- inertial control
- infinitely fast control
- infinity control
- in-process control
- instantaneous automatic gain control
- integral control
- intelligent control
- intensity control
- interface-shape control
- interference control
- intermediate control
- intermittent control
- internal control
- interrupt control
- inventory control
- ISDN data link control
- ISDN media access control
- keyboard control
- keyboard reset control
- learning control
- linear control
- linearity control
- local control
- logical control
- logical link control
- long-range control
- loop control
- loudness control
- lower-level intelligent control
- manual control
- manual gain control
- mass storage volume control
- master brightness control
- master control
- master gain control
- material gap control
- mechanical fader control
- medium access control
- message data link control
- microcomputer control
- microprocessor control
- microprogrammed control
- middle control
- MIDI control
- mission control
- mobile communications control
- mode control
- motor control
- motor-concatenation control
- motor-field control
- motor-voltage control
- multicoordinate control
- multivariable control
- musical instrument digital interface control
- narrow control
- neighboring optimal control
- neuromuscular control
- noise gain control
- nuclear level control
- numerical control
- off-line control
- on-line control
- on-off control
- open-loop control
- optimal control
- organizational control
- overtemperature control
- parametric control
- parity control
- partitioned adaptive control
- passively adaptive control
- pattern control
- peaking control
- peripheral control
- phase control
- phase-shift control
- photoelectric control
- photoelectric loop control
- photoelectric register control
- pin control
- plugged control
- point-to-point control
- portamento control
- positioning control
- power up/down control
- precision control
- presence control
- priority control
- process control
- program control
- programmable gain control
- project control
- proportional control
- proportional plus derivative control
- proportional plus integral plus derivative control
- PTP control
- purity control
- push-button control
- quality control
- quiet automatic volume control
- radar control
- radar traffic control
- radio control
- radio-frequency interference control
- random decision-directed adaptive control
- range control
- rate control
- ratio control
- ray-control
- real-time control
- recording control
- red-gain control
- reflexive control
- regeneration control
- regional playback control
- reject control
- relay control
- relay directional control
- reliability control
- remote control
- retarded control
- rewind control
- RFI control
- ringing control
- robot control
- roll-and-pitch control
- rounding control
- saturation control
- screen control
- security controls
- selectivity control
- self-acting control
- self-organizing control
- semiremote control
- sensitivity control
- sensitivity-time control
- sequence control
- sequential control
- servo control
- servo-loop control
- set-point control
- sidetone control
- single-dial control
- size control
- slide control
- software error control
- sound control
- sound volume control
- speech control
- speed control
- spin control
- squelch control
- static control
- statistical process control
- statistical quality control
- stored-program control
- supervisory control
- surge control
- swept gain control
- synchronous data link control
- system-wide control
- tapped control
- temperature control
- temporal gain control
- time polarity control
- time-schedule control
- time-varied gain control
- titration control
- tone control
- tone-compensated audio volume control
- total distributed control
- total quality control
- touch-sensitive control
- traffic control
- treble control
- trigger control
- tuning control
- undertemperature control
- unilateral control
- usage parameter control
- variable speech control
- vertical convergence control
- vertical-amplitude control
- vertical-centering control
- vertical-hold control
- vertical-linearity control
- video gain control
- visit mobile communications control
- voice control
- volume control
- white-level control
- wide control
- width controlThe New English-Russian Dictionary of Radio-electronics > control
-
4 interface
1) поверхность раздела; граница раздела; межфазная граница2) сопряжение; согласование; стык || сопрягать; согласовывать; состыковывать4) граница между двумя материалами (напр. в составной балке)5) вчт., рбт интерфейс, устройство сопряжения, связь стык•-
A/D interface
-
air-to-glass interface
-
air-glass interface
-
analog interface
-
asynchronous interface
-
audio interface
-
back-end interface
-
balanced interface
-
baseband interface
-
bit-parallel interface
-
bit-serial interface
-
bus interface
-
cathode interface
-
closely coupled interface
-
coherent interphase interface
-
command interface
-
common bus interface
-
connector interface
-
control interface
-
current loop interface
-
digital interface
-
digital noninterpolated interface
-
dimeric interface
-
direct-memory-access interface
-
disconnectable interface
-
docking interface
-
engineered interface
-
external interface
-
fiber-matrix interface
-
freezing interface
-
front-end interface
-
full-scale intelligent interface
-
gas-liquid interface
-
gas-solid interface
-
general-purpose interface
-
graphic interface
-
grinding interface
-
gripper-workpiece interface
-
growing interface
-
hardware interface
-
heat-exchange interface
-
high-speed interface
-
hybrid interface
-
icon interface
-
imbalanced interface
-
input/output interface
-
intelligent interface
-
intelligent peripheral interface
-
internetwork interface
-
language interface
-
layer interface
-
liquid-liquid interface
-
liquid interface
-
liquid-vapor interface
-
locating receiver interface
-
loosely coupled interface
-
machine magnetics interface
-
man-machine interface
-
master-slave interface
-
material handling interface
-
material handling/robot interface
-
matrix-precipitate interface
-
menu-driven interface
-
metal-to-ceramic interface
-
multiple-access interface
-
oil-water interface
-
operating interface
-
peripheral interface
-
phase interface
-
p-n interface
-
process interface
-
production/stores interface
-
programmable peripheral interface
-
programmer interface
-
rim-core interface
-
robot interface
-
robot structure interface
-
seed-melt interface
-
slag-metal interface
-
sliding interface
-
small-scale intelligent interface
-
smooth interface
-
solar cell-air interface
-
solid-liquid interface
-
solid-melt interface
-
standardized interface
-
subscriber-line interface
-
system interface
-
tool interface
-
transformerless interface
-
transparent interface
-
trueing interface
-
truing interface
-
twin interface
-
unbalanced interface
-
user interface
-
user-friendly interface
-
video interface
-
vision interface
-
voice-transmitter data interface -
5 process
1) процесс
2) обработать
3) перерабатывать
4) движение
5) течение
6) прием
7) способ
8) обрабатывать
9) процедура
10) технологический
11) обрабатывающий
12) вычислительный
– activate a process
– additive process
– adiabatic process
– adjoint process
– aluninography process
– anaerobic process
– auxiliary process
– averaging process
– batch process
– Bessemer process
– bloomery process
– branching process
– commercialize a process
– computational process
– continuous process
– controlled process
– converter process
– correlated process
– counter-flow process
– Crouse process
– cupola process
– decision process
– denumerable process
– destroy a process
– deterministic process
– diagonal process
– diffusion process
– doping process
– dry-press process
– EFG process
– emigration process
– endothermic process
– equally-correlated process
– equilibrium process
– ergodic process
– exhaustion process
– exothermic process
– explosive process
– fit process adequately
– hereditary process
– ideal process
– immigration process
– implement process
– input process
– install process
– inverse process
– irreversible process
– isentropic process
– isobaric process
– isochoric process
– isothermal process
– iterative process
– Kroll process
– limit process
– Markov process
– martingale process
– Moebius process
– non-steady process
– nonequilibrium process
– nonpreemptive process
– open-hearth process
– optimal process
– Orbach process
– oxidizing process
– path of a process
– periodic process
– pig-and-ore process
– preemptive process
– probabilistic process
– process acid
– process camera
– process chart
– process condensate
– process data
– process design
– process engineering
– process feed
– process film
– process gas
– process information
– process installation
– process interface
– process liquid
– process liquor
– process load
– process occurs
– process of exhaustion
– process oil
– process oxygen
– process runs
– process steam
– process the rubber
– process variable
– process water
– production process
– random process
– rate process
– reduction process
– regular process
– repetitive process
– reproduce process
– reverberatory process
– reversible process
– rotor process
– sequential process
– soft-mud process
– stationary process
– steady-state process
– steel-making process
– stencil process
– stochastic process
– transient process
– transport process
– umklapp process
– unit process
– unsteady process
– welding process
– Wohlwill process
– xiphoid process
birth and death process — <math.> процесс рождения и гибели
chromizing by powder process — твердое диффузионное хромирование
disturbed harmonic process — возмущенный гармонический процесс
drawn-gate CMOS process — технология КМОП-схем с удлиненными затворами
realization of random process — реализация случайного процесса
strictly stationary process — стационарный в узком смысле процесс
-
6 interface model of a substation automation system
логические интерфейсы на подстанции
-
[Интент]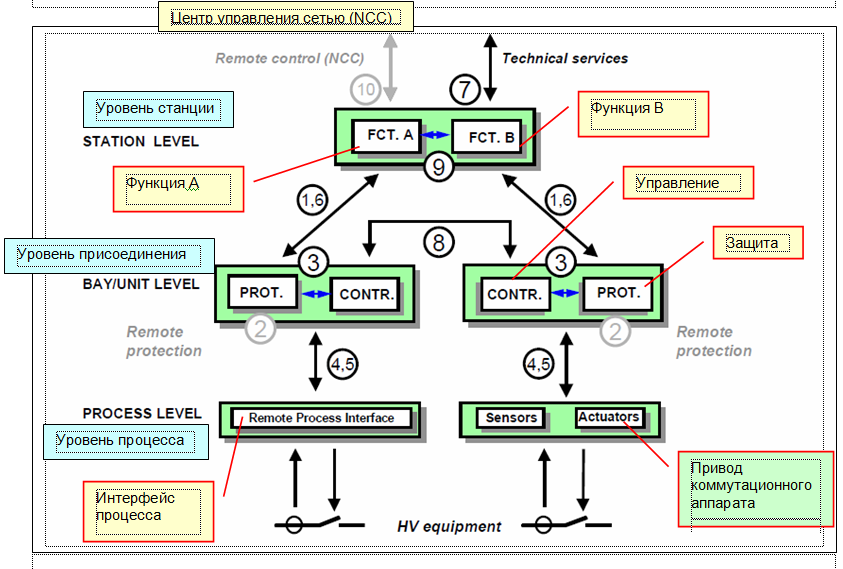 Interface model of a substation automation systemЛогические интерфейсы на подстанции
Interface model of a substation automation systemЛогические интерфейсы на подстанции1
protection-data exchange between bay and station level.
обмен сигналами функций защиты между уровнями присоединения и станции.
2
protection-data exchange between bay level and remote protection (beyond the scope of this standard).
обмен сигналами функций защиты между уровнем присоединения одного объекта и уровнем присоединения смежного объекта.
3
data exchange within bay level
обмен данными в рамках уровня присоединения
4
CT and VT instantaneous data exchange (especially samples) between process and bay level.
передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
5
control-data exchange between process and bay level
обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения.
6
control-data exchange between bay and station level
обмен сигналами функций управления между уровнем присоединения и уровнем станции.
7
data exchange between substation (level) and a remote engineer’s workplace
обмен данными между уровнем станции и удаленным рабочим местом инженера
8
direct data exchange between the bays especially for fast functions such as interlocking
прямой обмен данными между присоединениями, в частности, для реализации быстродействующих функций, таких как оперативная блокировка.
9
data exchange within station level
обмен данными в рамках уровня станции.
10
control-data exchange between substation (devices) and a remote control centre (beyond the scope of this standard).обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром.
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > interface model of a substation automation system
7 control-data exchange between process and bay level
- обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения
обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения
-
[Интент]Interface model of a substation automation systemЛогические интерфейсы на подстанции1
protection-data exchange between bay and station level.
обмен сигналами функций защиты между уровнями присоединения и станции.
2
protection-data exchange between bay level and remote protection (beyond the scope of this standard).
обмен сигналами функций защиты между уровнем присоединения одного объекта и уровнем присоединения смежного объекта.
3
data exchange within bay level
обмен данными в рамках уровня присоединения
4
CT and VT instantaneous data exchange (especially samples) between process and bay level.
передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
5
control-data exchange between process and bay level
обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения.
6
control-data exchange between bay and station level
обмен сигналами функций управления между уровнем присоединения и уровнем станции.
7
data exchange between substation (level) and a remote engineer’s workplace
обмен данными между уровнем станции и удаленным рабочим местом инженера
8
direct data exchange between the bays especially for fast functions such as interlocking
прямой обмен данными между присоединениями, в частности, для реализации быстродействующих функций, таких как оперативная блокировка.
9
data exchange within station level
обмен данными в рамках уровня станции.
10
control-data exchange between substation (devices) and a remote control centre (beyond the scope of this standard).обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром.
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > control-data exchange between process and bay level
8 control-data exchange between substation (devices) and a remote control centre
- обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром
обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром
-
[Интент]Interface model of a substation automation systemЛогические интерфейсы на подстанции1
protection-data exchange between bay and station level.
обмен сигналами функций защиты между уровнями присоединения и станции.
2
protection-data exchange between bay level and remote protection (beyond the scope of this standard).
обмен сигналами функций защиты между уровнем присоединения одного объекта и уровнем присоединения смежного объекта.
3
data exchange within bay level
обмен данными в рамках уровня присоединения
4
CT and VT instantaneous data exchange (especially samples) between process and bay level.
передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
5
control-data exchange between process and bay level
обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения.
6
control-data exchange between bay and station level
обмен сигналами функций управления между уровнем присоединения и уровнем станции.
7
data exchange between substation (level) and a remote engineer’s workplace
обмен данными между уровнем станции и удаленным рабочим местом инженера
8
direct data exchange between the bays especially for fast functions such as interlocking
прямой обмен данными между присоединениями, в частности, для реализации быстродействующих функций, таких как оперативная блокировка.
9
data exchange within station level
обмен данными в рамках уровня станции.
10
control-data exchange between substation (devices) and a remote control centre (beyond the scope of this standard).обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром.
Тематики
EN
- control-data exchange between substation (devices) and a remote control centre
Англо-русский словарь нормативно-технической терминологии > control-data exchange between substation (devices) and a remote control centre
9 control-data exchange between bay and station level
- обмен сигналами функций управления между уровнем присоединения и уровнем станции
обмен сигналами функций управления между уровнем присоединения и уровнем станции
-
[Интент]Interface model of a substation automation systemЛогические интерфейсы на подстанции1
protection-data exchange between bay and station level.
обмен сигналами функций защиты между уровнями присоединения и станции.
2
protection-data exchange between bay level and remote protection (beyond the scope of this standard).
обмен сигналами функций защиты между уровнем присоединения одного объекта и уровнем присоединения смежного объекта.
3
data exchange within bay level
обмен данными в рамках уровня присоединения
4
CT and VT instantaneous data exchange (especially samples) between process and bay level.
передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
5
control-data exchange between process and bay level
обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения.
6
control-data exchange between bay and station level
обмен сигналами функций управления между уровнем присоединения и уровнем станции.
7
data exchange between substation (level) and a remote engineer’s workplace
обмен данными между уровнем станции и удаленным рабочим местом инженера
8
direct data exchange between the bays especially for fast functions such as interlocking
прямой обмен данными между присоединениями, в частности, для реализации быстродействующих функций, таких как оперативная блокировка.
9
data exchange within station level
обмен данными в рамках уровня станции.
10
control-data exchange between substation (devices) and a remote control centre (beyond the scope of this standard).обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром.
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > control-data exchange between bay and station level
10 Process Interface Control
File extension: PICУниверсальный русско-английский словарь > Process Interface Control
11 human-computer interface
интерфейс человек-машина
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
пользовательский интерфейс
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human-computer interface
12 man-machine interface
- человеко-машинный интерфейс
- интерфейс "человекмашина"
интерфейс "человекмашина"
(МСЭ-Т Q.1741).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > man-machine interface
13 human interface
интерфейс с пользователем
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human interface
14 computer human interface
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > computer human interface
15 human interface device
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human interface device
16 human-machine interface
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).
Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7).
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > human-machine interface
17 remote control and monitoring of your installation
дистанционное управление и контроль состояния электроустановки
-
[Интент]Параллельные тексты EN-RU
Remote control and monitoring of your installation
A continuous, real-time communication interface with your control and monitoring systems for energy management and process control.
> MotorSys™ iPMCC solutions communicate with the major industrial local area networks on the market (Ethernet TCP / IP, Profibus-DP, DeviceNet, Modbus, etc.).
> With data delivered in real time, your operational and maintenance staff will have immediate access to the relevant information to control your motors and electrical distribution locally or remotely.
> Warning messages can be sent automatically to a mobile phone in the event of an alarm or group of alarms.
[Schneider Electric]Дистанционное управление и контроль состояния электроустановки
Энергетический менеджмент и управление технологическими процессами, использующие непрерывный интерфейс реального времени для управления и контроля состояния.
> MotorSys™ – интеллектуальный центр распределения электроэнергии и управления электродвигателями – может работать со всеми основными известными на рынке локальными сетями (Ethernet TCP/IP, Profibus-DP, DeviceNet, Modbus и др.).
> Поступление данных в реальном времени дает возможность оперативному и эксплуатационному персоналу мгновенно получать информацию, позволяющую управлять электродвигателями и распределением электроэнергии как в режиме местного, так и дистанционного управления.
> При возникновении одной или нескольких аварийных ситуаций система может автоматически посылать аварийные сообщения на мобильный телефон
[Перевод Интент]Тематики
- НКУ (шкафы, пульты,...)
EN
Англо-русский словарь нормативно-технической терминологии > remote control and monitoring of your installation
18 CT and VT instantaneous data exchange (especially samples) between process and bay level
- передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
-
[Интент]Interface model of a substation automation systemЛогические интерфейсы на подстанции1
protection-data exchange between bay and station level.
обмен сигналами функций защиты между уровнями присоединения и станции.
2
protection-data exchange between bay level and remote protection (beyond the scope of this standard).
обмен сигналами функций защиты между уровнем присоединения одного объекта и уровнем присоединения смежного объекта.
3
data exchange within bay level
обмен данными в рамках уровня присоединения
4
CT and VT instantaneous data exchange (especially samples) between process and bay level.
передача мгновенных значений тока и напряжения от измерительных преобразователей (уровень процесса) к устройствам уровня присоединения
5
control-data exchange between process and bay level
обмен сигналами функций управления оборудованием уровня процесса и уровня присоединения.
6
control-data exchange between bay and station level
обмен сигналами функций управления между уровнем присоединения и уровнем станции.
7
data exchange between substation (level) and a remote engineer’s workplace
обмен данными между уровнем станции и удаленным рабочим местом инженера
8
direct data exchange between the bays especially for fast functions such as interlocking
прямой обмен данными между присоединениями, в частности, для реализации быстродействующих функций, таких как оперативная блокировка.
9
data exchange within station level
обмен данными в рамках уровня станции.
10
control-data exchange between substation (devices) and a remote control centre (beyond the scope of this standard).обмен сигналами функций управления между уровнем станции и удаленным диспетчерским центром.
Тематики
EN
- CT and VT instantaneous data exchange (especially samples) between process and bay level
Англо-русский словарь нормативно-технической терминологии > CT and VT instantaneous data exchange (especially samples) between process and bay level
19 water-oil interface control
Глоссарий компании Сахалин Энерджи: управление поверхностью раздела вода-нефть (process unit), (process unit) контроль поверхности раздела вода-нефтьУниверсальный англо-русский словарь > water-oil interface control
20 water/oil interface control
Сахалин Р: управление поверхностью раздела вода-нефть (process unit)Универсальный англо-русский словарь > water/oil interface control
СтраницыСм. также в других словарях:
OLE for process control — (OPC), which stands for Object Linking and Embedding (OLE) for Process Control, is the original name for a standards specification developed in 1996 by an industrial automation industry task force. The standard specifies the communication of real … Wikipedia
OLE for process control — Pour les articles homonymes, voir OPC. La technologie OPC est apparue en 1995. Cette technologie dédiée à l interopérabilité des systèmes industriels signifiait initialement OLE for Process Control. OPC n est pas un protocole de communication… … Wikipédia en Français
Ole for process control — Pour les articles homonymes, voir OPC. La technologie OPC est apparue en 1995. Cette technologie dédiée à l interopérabilité des systèmes industriels signifiait initialement OLE for Process Control. OPC n est pas un protocole de communication… … Wikipédia en Français
OLE for Process Control — Pour les articles homonymes, voir OPC. La technique OPC est apparue en 1995. Cette technique dédiée à l interopérabilité des systèmes industriels signifiait initialement OLE for Process Control. OPC n est pas un protocole de communication mais… … Wikipédia en Français
OLE for Process Control — (OPC) war der ursprüngliche Name für standardisierte Software Schnittstellen, die den Datenaustausch zwischen Anwendungen unterschiedlichster Hersteller in der Automatisierungstechnik ermöglichen sollte. Durch die fortschreitende… … Deutsch Wikipedia
Process management (computing) — Operating systems … Wikipedia
Process area (CMMI) — The latest version of Capability Maturity Model Integration (CMMI) CMMI for Development, Version 1.3 contains 22 Process Areas that describe the aspects of product development that are to be covered by organizational processes. Contents 1 Process … Wikipedia
Process group — In POSIX conformant operating systems, a process group denotes a collection of one or more processes. Process groups are used to control the distribution of signals. A signal directed to a process group is delivered individually to all of the… … Wikipedia
Control-Alt-Delete — This article is about the keyboard combination. For a list of keyboard shortcuts, see Table of keyboard shortcuts. For other uses, see Control Alt Delete (disambiguation). The keys Control Alt Delete highlighted on a QWERTY keyboard. Control Alt… … Wikipedia
Control Data Corporation — (CDC) was a supercomputer firm. For most of the 1960s, it built the fastest computers in the world by far, only losing that crown in the 1970s after Seymour Cray left the company to found Cray Research, Inc. (CRI). CDC was one of the nine major… … Wikipedia
Interface Builder — This article is about the Mac OS X application. For the general concept, see Graphical user interface builder. Developer(s) Apple Inc. Stable release 3.2.6 / Released March 1 … Wikipedia
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на все языки
со всех языков на все языки- Со всех языков на:
- Все языки
- Со всех языков на:
- Все языки
- Албанский
- Английский
- Испанский
- Русский
- Украинский